Visualizing with Rviz¶
After setting up your robot and adding the sensors you want, you can now visualize your robot’s updated model in rviz. In addition, if you have the physical sensors and included the launching of their drivers, you can also visualize your sensors’ data.
The Robot Customizer ROS package provides a useful .launch file for visualization in rviz. This file is called rviz.launch, and can be found here.
To use it, simply launch rviz.launch and provide the description_launch argument with the path to your robot’s .launch file. For example, you can visualize the model of the example generic_robot.urdf.xacro robot along with the SICK LMS1xx 2D laser scanner attached to it. In terminal, run:
roslaunch cpr_robot_customizer rviz.launch description_launch:=/home/administrator/catkin_ws/src/cpr_robot_customizer/example/description.launch
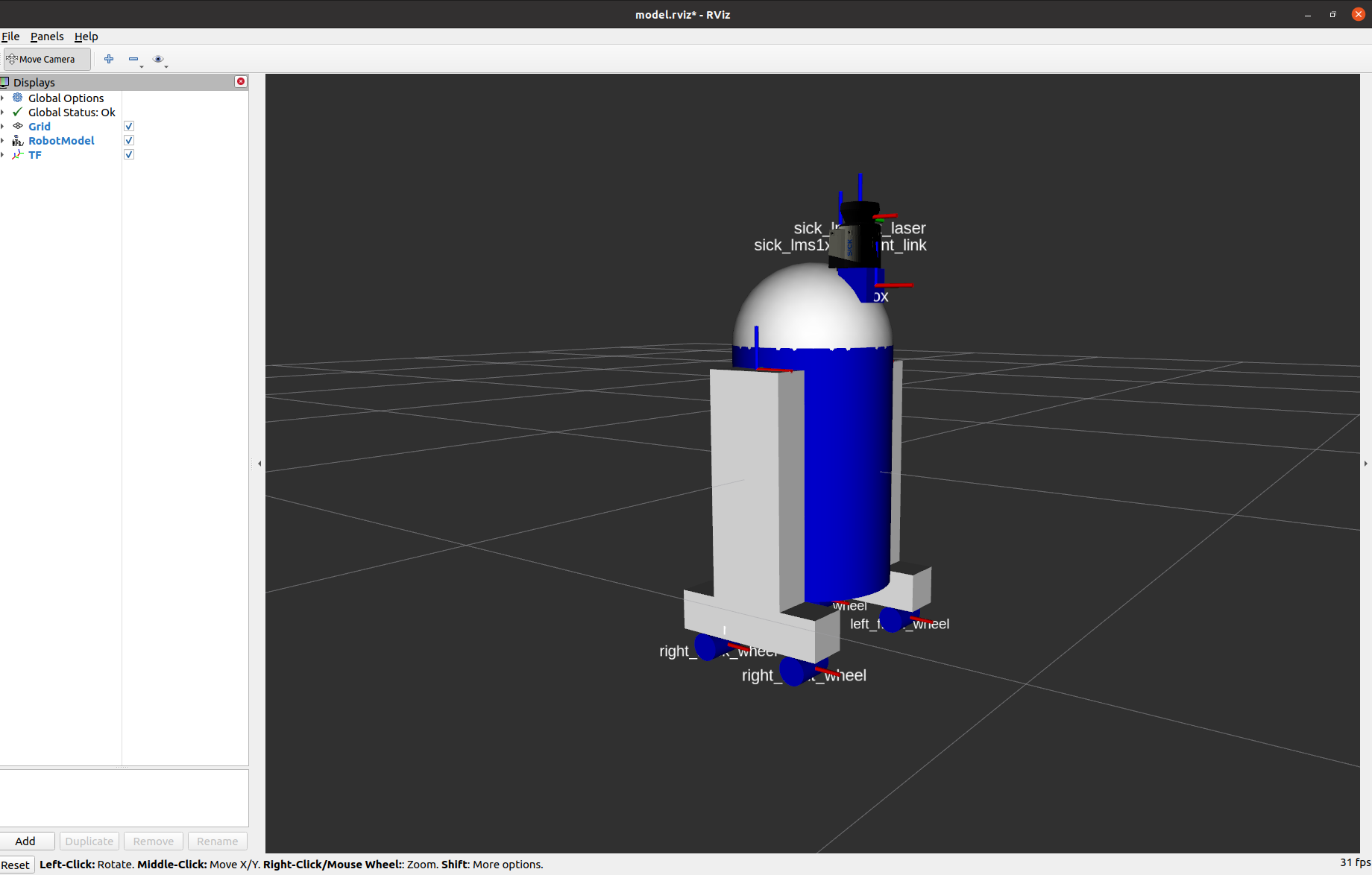
Once rviz loads, you should see the model of the example generic robot, along with the SICK LMS1xx 2D laser scanner mounted ontop of the box link.
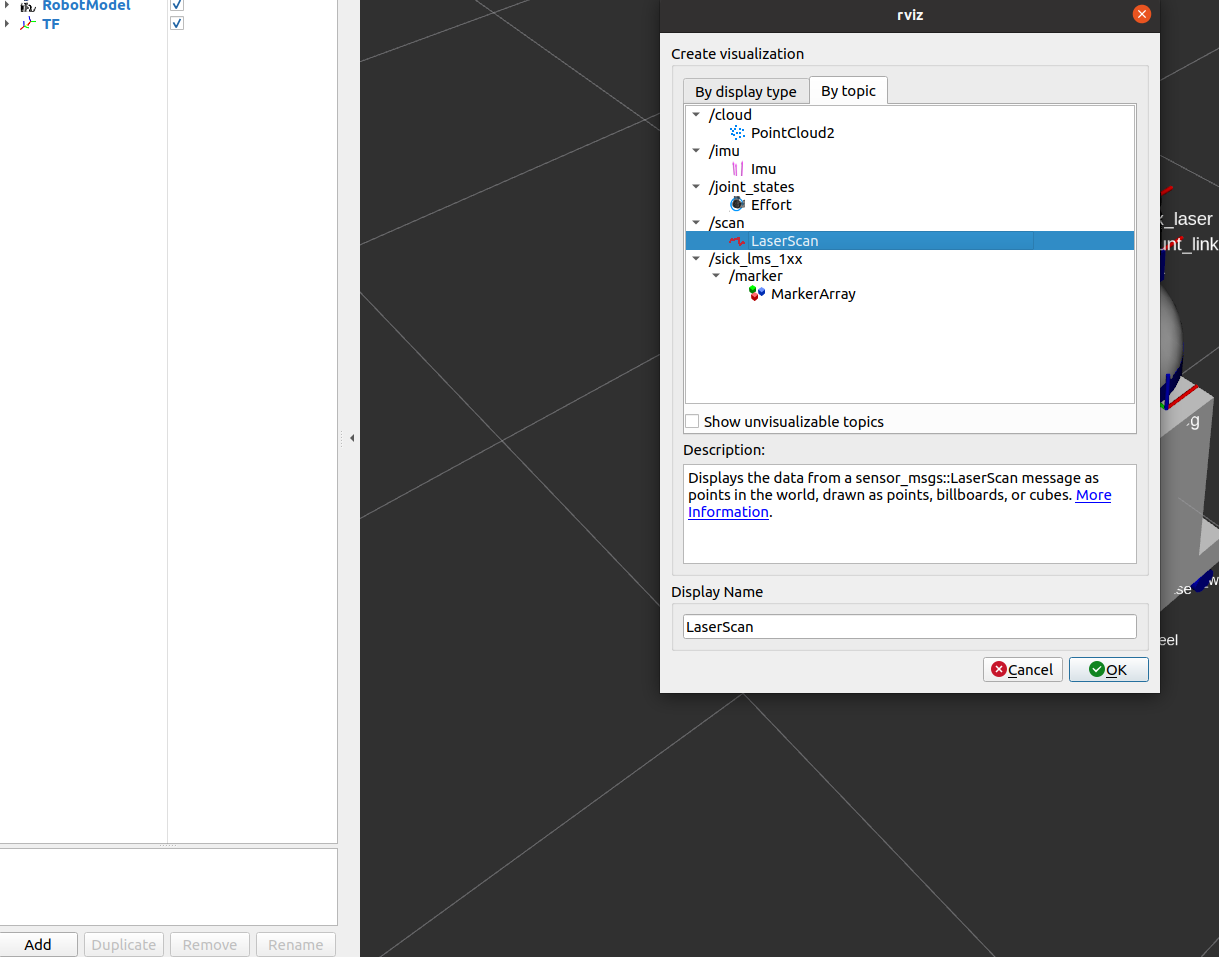
In addition, if you have the physical sensor setup, you can also add the /scan ROS topic to rviz to see the 2D laser scans from the SICK LMS1xx 2D laser scanner.