Extending Heron’s Startup¶
Now that’s you’ve had Heron for a while, you may be interested in how to extend it— perhaps add some more payloads, or augment the URDF.
Startup Launch Context¶
When ROS packages are grouped together in a directory and then built as one, the result is referred to as a
workspace. Each workspace generates a setup.bash file which the user may source in order to correctly
set up important environment variables such as PATH, PYTHONPATH, and CMAKE_PREFIX_PATH.
The standard system-wide setup file is in opt:
source /opt/ros/melodic/setup.bash
When you run this command, you’ll have access to rosrun, roslaunch, and all the other tools and packages installed on your system from debian packages.
However, sometimes you want to add additional system-specific environment variables, or perhaps packages built
from source. For this reason, Clearpath platforms use a wrapper setup file, located in /etc/ros:
source /etc/ros/setup.bash
This is the setup file which gets sourced by Heron’s background launch job, and in the default configuration, it is also sourced on your login session. For this reason it can be considered the “global” setup file for Heron’s ROS installation.
This file sets some environment variables and then sources a chosen ROS workspace, so it is one of your primary modification points for altering how Heron launches.
Launch Files¶
The second major modification point is the /etc/ros/melodic/ros.d directory. This location contains the
launch files associated with the ros background job. If you add launch files here, they will be launched with
Heron’s startup.
However, it’s important to note that in the default configuration, any launch files you add may only reference ROS
software installed in /opt/ros/melodic/. If you want to launch something from workspace in
the home directory, you must change /etc/ros/setup.bash to source that workspace’s setup file rather than the
one from opt.
Adding URDF¶
There are two possible approaches to augmenting Heron’s URDF. The first is that you may simply set the
HERON_URDF_EXTRAS environment variable in /etc/ros/setup.bash. By default, it points to an empty dummy file,
but you can point it to a file of additional links and joints which you would like mixed into Heron’s URDF (via
xacro) at runtime.
The second, more sophisticated way to modify the URDF is to create a new package for your own robot, and build your own URDF which wraps the one provided by heron_description.
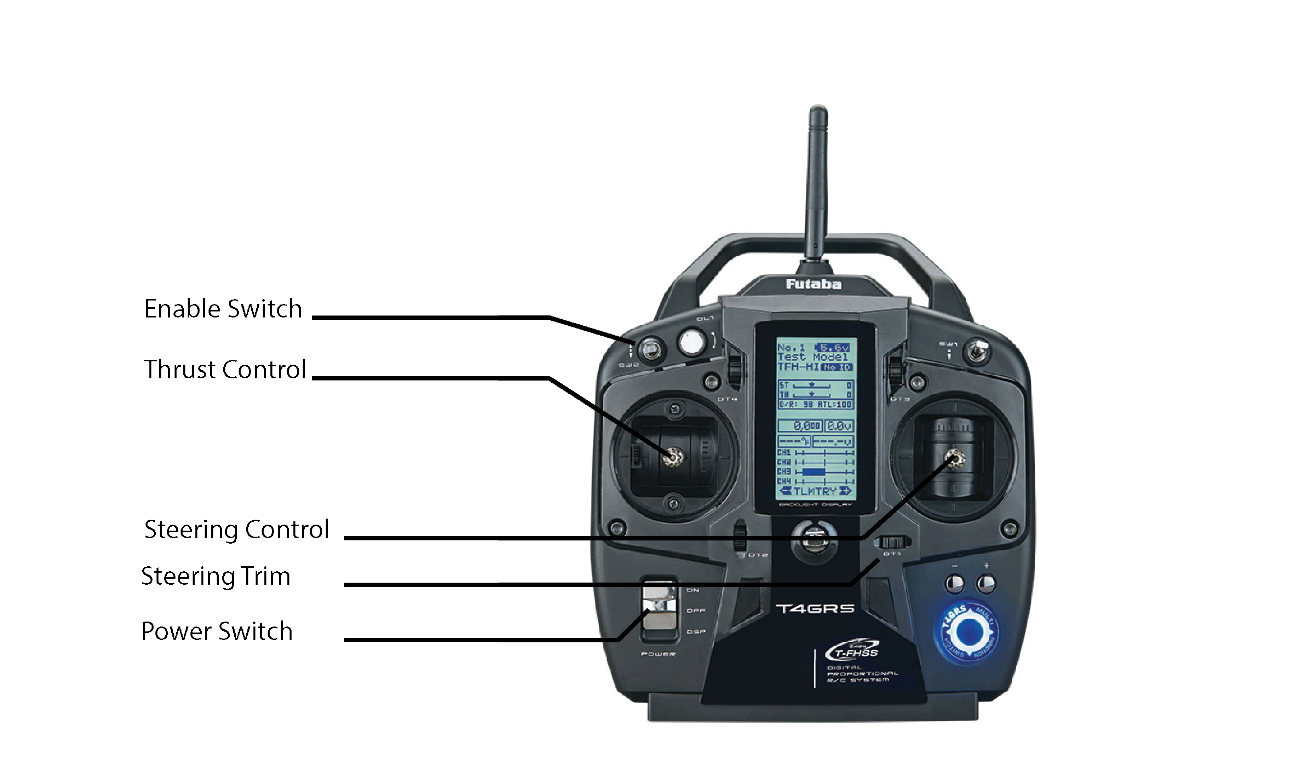
Controller¶
Heron ships with a Futaba controller. To control the robot the “Enable” switch must be engaged. The left control stick control’s Heron’s forward speed, which the right stick controls Heron’s steering.