
Written by Steffi Paepcke and originally posted on Open Source Robotics Foundation Blog on June 17, 2016.
Clearpath Robotics is best known for building yellow and black robots that are the research platforms you’d build for yourself; that is, if it wasn’t much easier to just get them from Clearpath Robotics. All of their robots run ROS, and Clearpath has been heavily involved in the ROS community for years. Now with Locus Robotics, Tom Moore spent seven months as an autonomy developer at Clearpath. He is the author and maintainer of the robot_localization ROS package, and gave a presentation about it at ROSCon 2015.
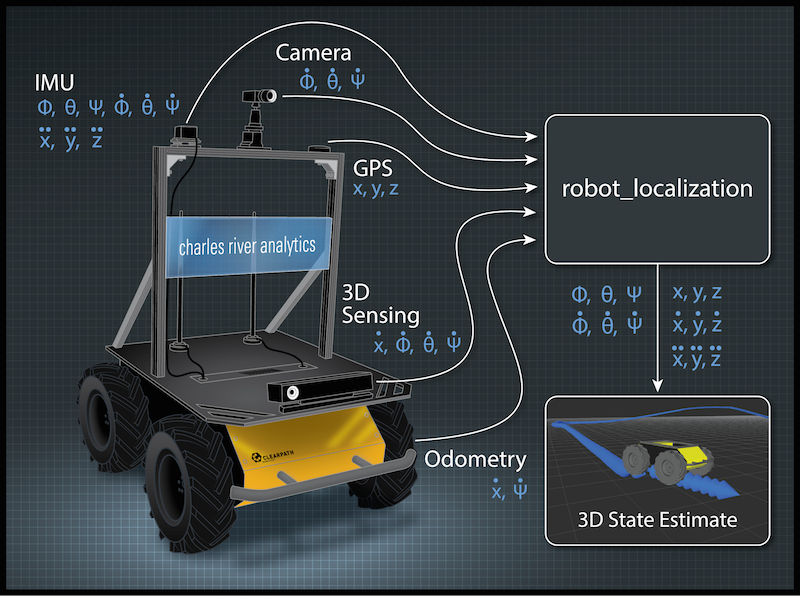
robot_localization is a general purpose state estimation package that’s used to give you (and your robot) an accurate sense of where it is and what it’s doing, based on input from as many sensors as you want. The more sensors that you’re able to use for a state estimate, the better that estimate is going to be, especially if you’re dealing with real-worldish things like unreliable GPS or hardware that flakes out on you from time to time. robot_localization has been specifically designed to be able to handle cases like these, in an easy to use and highly customizable way. It has state estimation in 3D space, gives you per-sensor message control, allows for an unlimited number of sensors (just in case you have 42 IMUs and nothing better to do), and more.
Tom’s ROSCon talk takes us through some typical use cases for robot_localization, describes where the package fits in with the ROS navigation stack, explains how to prepare your sensor data, and how to configure estimation nodes for localization. The talk ends with a live(ish) demo, followed by a quick tutorial on how to convert data from your GPS into your robot’s world frame.
The robot_localization package is up to date and very well documented, and you can learn more about it on the ROS Wiki.