

Minesweeping is incredibly time-intensive and dangerous; it’s estimated that over 20 thousand people lose their lives in mine-related accidents each year. With statistics such as this, it’s no wonder robots haven’t been used in mine detecting scenarios sooner. To build awareness and advance this technology, IEEE Robotics and Automation Society (RAS) will be hosting the first ever Humanitarian Robotics and Automation Technology Challenge (HRATC) to be held at ICRA 2014 (May 31-June 1). The Challenge aims to promote and develop new strategies for autonomous landmine detection and will be conducted virtually, with the physical robot situated in Coimbra, Portugal, so teams from around the world can participate.
New sights for humanitarian robotics
This application of robotics and automation is organized to raise awareness of humanitarian causes around the globe – it runs in partnership with IEEE RAS-SIGHT (the first and only IEEE Society to have a SIGHT). RAS-SIGHT leverages existing and emerging technologies for the benefit of humanity and aims at increasing the quality of life in underserved, underdeveloped areas in collaboration with existing global communities and organizations. It’s easy to understand why RAS-SIGHT is the organizing partner in HRATC – the Challenge will engage the international community for a noble humanitarian cause.
The Chair of RAS-SIGHT, Raj Madhavan, says “I am thrilled to be co-organizing this Challenge; we see it as a multi-year effort, at the end of which, we hope to have a cost effective solution that can be proliferated across the globe to solve the landmine problem. Our team of organizers from around the world (i.e: Dr. Lino Marques from Portugal, Dr. Edson Prestes in Brazil, and Drs. Raj Madhavan and Raj Dasgupta from USA) are united in this cause. With thirteen teams submitting their entries from six different countries, we are looking forward to an exciting and competitive Challenge at ICRA’14.”
What’s involved?
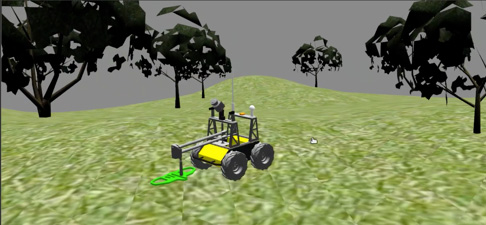
Virtual Simulation of Minesweeping Robot
Participants of the challenge were asked to submit a brief paper to describe their motivation, previous experiences, research (if any), and the main techniques that will be used during the Challenge. Teams accepted to participate will use the same robot during the Challenge. Remember University of Coimbra’s minesweeping robot developed from Husky? The team has partnered up with RAS-SIGHT to be the official robot for HRATC.
What may possibly be the coolest feature of the Challenge (aside from the fact that the technology is essentially life-saving!) is that all participants will be able to compete virtually. That’s right! They can log in from a location anywhere in the world to control the Husky-based robot and take part in the Challenge.
The strategies applied to the technology will be evaluated according to the following criteria:
• Exploration time and environmental coverage
• Detection and classification quality
• Landmine avoidance
About the ‘bot

Coimbra’s Mine Detection Robot
The team at University of Coimbra developed their mine-sweeping robot on a Husky UGV platform; the base was awarded to the team as part of Clearpath’s 2010 Partnerbot Grant Program, which was inaugurated to support and advance robotics research around the world. The team was able to bring their research to the field faster and we’re thrilled to see that it is now being incorporated into HRATC.
We wish all competing teams the best of luck! It’s our honor to support such a fantastic cause, and we look forward to learning about the advanced technologies that arise from this event. For more details, visit http://www2.isr.uc.pt/~embedded/events/HRATC2014/Welcome.html