jackal_description Package¶
The jackal_description package is the URDF robot description for Jackal UGV.
Overview¶
This package provides a URDF model of Jackal. For an example launchfile to use in visualizing this model, see jacakl_viz.
Accessories¶
Jackal has a suite of optional payloads called accessories. These payloads can be enabled and placed on Jackal using environment variables specified at the time the xacro is rendered to URDF. Available accessory vars are:
Variable |
Default |
Description |
JACKAL_LASER |
0 |
Enable primary laser scanner. By default this is a Sick LMS1xx, unless JACKAL_LASER_MODEL is set. |
JACKAL_LASER_MODEL |
lms1xx |
Sets the model of the primary lidar sensor on the robot. Ignored if JACKAL_LASER is 0. Allowed values are:
Replaces the JACKAL_LASER_HOKUYO from older versions of Jackal. |
JACKAL_LASER_MOUNT |
front |
Where to attach primary laser scanner on Jackal. |
JACKAL_LASER_OFFSET |
"0 0 0" |
XYZ offset from the mount. |
JACKAL_LASER_RPY |
"0 0 0" |
RPY offset from the mount (eg, to face it backward). |
JACKAL_LASER_HOST |
192.168.1.20 |
IP address of main lidar (used by jackal_bringup) |
JACKAL_LASER_SECONDARY |
0 |
Enable secondary laser scanner. By default this is a Sick LMS1xx, unless JACKAL_LASER_SECONDARY_MODEL is set. |
JACKAL_LASER_SECONDARY_MODEL |
lms1xx |
Sets the model of the secondary lidar sensor on the robot. Ignored if JACKAL_LASER_SECONDARY is 0. Allowed values are:
|
JACKAL_LASER_SECONDARY_MOUNT |
rear |
Where to attach seondary laser scanner on Jackal. |
JACKAL_LASER_SECONDARY_OFFSET |
"0 0 0" |
XYZ offset from the mount. |
JACKAL_LASER_SECONDARY_RPY |
"0 0 3.14159" |
RPY offset from the mount (eg, to face it backward). |
JACKAL_LASER_SECONDARY_HOST |
192.168.1.21 |
IP address of secondary lidar (used by jackal_bringup) |
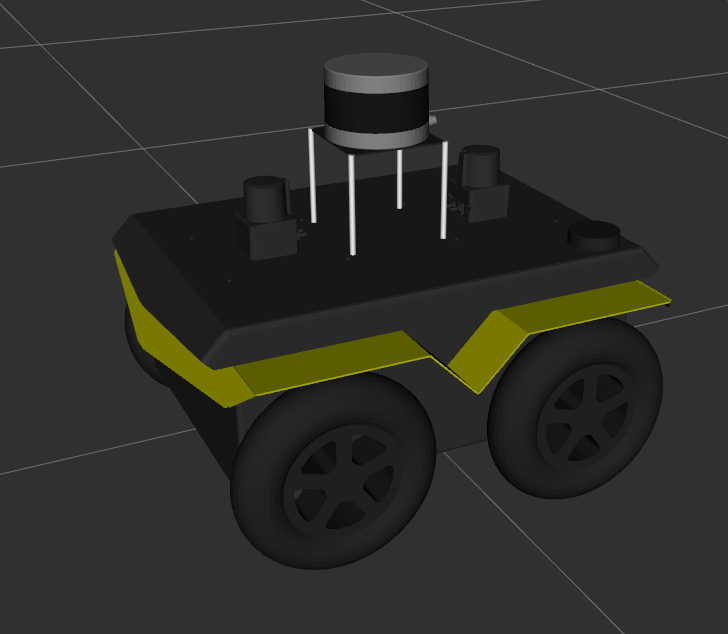
JACKAL_LASER_3D |
0 |
Enable a primary 3D laser scanner, by default a Velodyne VLP-16, unless JACKAL_LASER_3D_MODEL is set. |
JACKAL_LASER_3D_MODEL |
vlp16 |
Sets the model of the primary 3d lidar sensor on the robot. Ignored if JACKAL_LASER_3D is 0. Allowed values are:
|
JACKAL_LASER_3D_MOUNT |
mid |
Where to attach primary 3d laser scanner on Jackal. |
JACKAL_LASER_3D_OFFSET |
"0 0 0" |
XYZ offset from the mount. |
JACKAL_LASER_3D_RPY |
"0 0 0" |
RPY offset from the mount (eg, to face it backward). |
JACKAL_LASER_3D_HOST |
192.168.1.20 |
IP address of primary 3d lidar (used by jackal_bringup) |
JACKAL_FRONT_ACCESSORY_FENDER |
0 |
Enable the front accessory fender |
JACKAL_FRONT_FENDER_UST10 |
0 |
Enable a Hokuyo UST-10 lidar on the front accessory fender. Requires JACKAL_FRONT_ACCESSORY_FENDER to be 1 |
JACKAL_FRONT_LASER_TOPIC |
front/scan |
The topic for the front-facing UST-10 lidar. Requires JACKAL_FRONT_FENDER_UST10 to be 1 |
JACKAL_FRONT_LASER_TOPIC |
front/scan |
The topic for the front-facing UST-10 lidar. Requires JACKAL_FRONT_FENDER_UST10 to be 1 |
JACKAL_FRONT_LASER_HOST |
192.168.131.20 |
IP address of the front-facing UST-10 lidar |
JACKAL_REAR_ACCESSORY_FENDER |
0 |
Enable the rear accessory fender |
JACKAL_REAR_FENDER_UST10 |
0 |
Enable a Hokuyo UST-10 lidar on the rear accessory fender. Requires JACKAL_REAR_ACCESSORY_FENDER to be 1 |
JACKAL_REAR_LASER_TOPIC |
rear/scan |
The topic for the rear-facing UST-10 lidar. Requires JACKAL_REAR_FENDER_UST10 to be 1 |
JACKAL_REAR_LASER_HOST |
192.168.131.21 |
IP address of the rear-facing UST-10 lidar |
JACKAL_NAVSAT |
0 |
Enable upgraded NovAtel satellite navigation receiver. |
JACKAL_NAVSAT_MOUNT |
rear |
Where to attach upgraded GNSS to Jackal. |
JACKAL_NAVSAT_HEIGHT |
0.1 |
Height of GNSS receiver from mount point (metres). |
JACKAL_NAVSAT |
0 |
Enable upgraded NovAtel satellite navigation receiver. |
JACKAL_NAVSAT_MOUNT |
rear |
Where to attach upgraded GNSS to Jackal. |
JACKAL_NAVSAT_HEIGHT |
0.1 |
Height of GNSS receiver from mount point (metres). |
JACKAL_FLEA3 |
0 |
Enable a Pointgrey Flea3 camera. |
JACKAL_FLEA3_MOUNT |
front |
Where to attach the camera on Jackal. |
JACKAL_FLEA3_OFFSET |
"0 0 0" |
XYZ offset from the mount. |
JACKAL_FLEA3_RPY |
"0 0 0" |
RPY offset from the mount (eg, to face it backward). |
JACKAL_FLEA3_TILT |
"0.5236" |
The angle in radians of the camera where positive is down. |
JACKAL_BB2 |
0 |
Enable a Pointgrey Bumblebee2 camera. |
JACKAL_BB2_MOUNT |
front |
Where to attach the camera on Jackal. |
JACKAL_BB2_OFFSET |
"0 0 0" |
XYZ offset from the mount. |
JACKAL_BB2_RPY |
"0 0 0" |
RPY offset from the mount (eg, to face it backward). |
JACKAL_BB2_TILT |
0 |
The angle in radians of the camera where positive is down. |
JACKAL_BB2_CALIBRATION |
0 |
If the camera has a calibration. |
JACKAL_BB2_SERIAL |
0 |
The serial of the camera which is used for determining the calibration file name. |
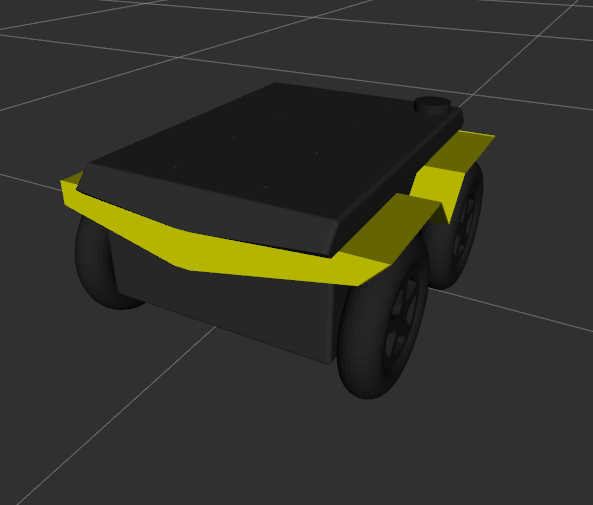
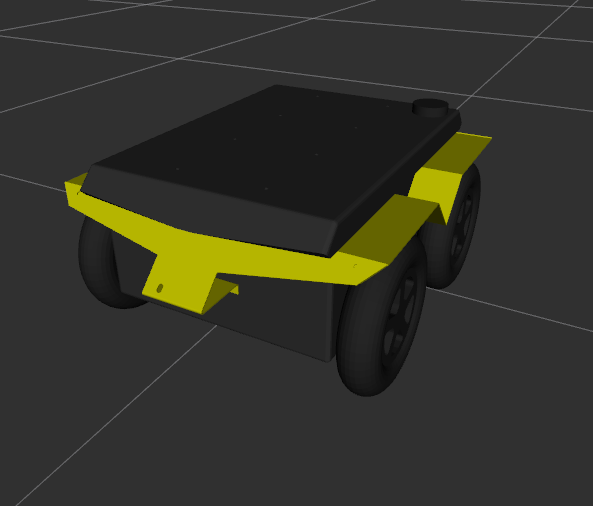
Accessory Fenders¶
Jackal can optionally include extended front and rear fenders for mounting accessories. Normally these are used for mounting dedicated front and rear laser scanners, but may be used for mounting other payloads.
If your Jackal includes fenders on the front and/or rear, make sure to set JACKAL_FRONT_ACCESSORY_FENDER and/or
JACKAL_REAR_ACCESSORY_FENDER as necessary.
Configurations¶
As an alternative to individually specifying each accessory, some fixed configurations are provided in the package. These can be specified using the config arg to description.launch, and are intended especially as a convenience for simulation launch.
Config: |
Description: |
|---|---|
base |
Base Jackal, includes IMU and GPS |
front_laser |
Include front-facing LMS1xx LIDAR. |
front_bumblebee2 |
Includes front-facing Pointgrey Bumblebee2 |
front_flea3 |
Includes front-facing Pointgrey Flea3 |
Please see jackal_simulator for more information on simulating Jackal.